大型复杂构件机器人移动加工关键技术
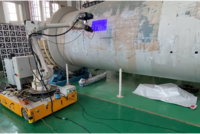
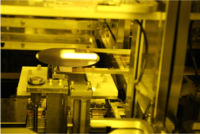
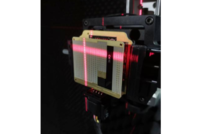
大型复杂构件是大型飞机、航天装备、海工装备的核心部件,通常具有尺寸超大、工位繁多、高长厚比等特点,且制造精度与表面质量要求极高。大型复杂构件超大的尺寸、特殊的结构形态以及严苛的工艺要求对制造装备和工艺保障技术均提出了严峻挑战。团队攻克了大型复杂构件机器人移动加工关键技术,提出了大型复杂构件移动机器人自律加工新方法,构建了大型复杂构件高效高精度拼接测量新框架,建立了大型复杂性构件机器人加工精度保障新机制。相关技术支持了航空关键零部件机器人磨抛系统、风电叶片机器人打磨系统,高铁白车身机器人磨抛系统的研发,有力支撑了大型复杂构件核心制造装备的发展。 团队研发的“测量-规划-加工”一体化移动加工机器人设备能够实现大型复杂构件的高精高效加工。相对于现有人工加工和固定式加工设备,团队提出的移动机器人技术利用了机器人高灵巧性优势,攻克了移动机器人加工系统的自律控制、多机协同和高精度测量等关键技术,解决了机器人可达性、自主执行和加工精度控制问题。相关研究成果在能源、交通、航空航天等领域关键零部件(如风电叶片、高铁车体、飞机蒙皮)的高精高效加工中有巨大应用潜力。
华中科技大学





 微信公众号
微信公众号
 下载app
下载app
 京公网安备 11010202008974号
京公网安备 11010202008974号