


一种用于船舶连续路径跟踪的圆弧路径生成方法
发布时间: 2023-11-13
基本信息
合作方式:
技术转让
成果类型:
发明专利
行业领域:
电子信息技术,智能交通技术,计算机及网络技术
成果介绍
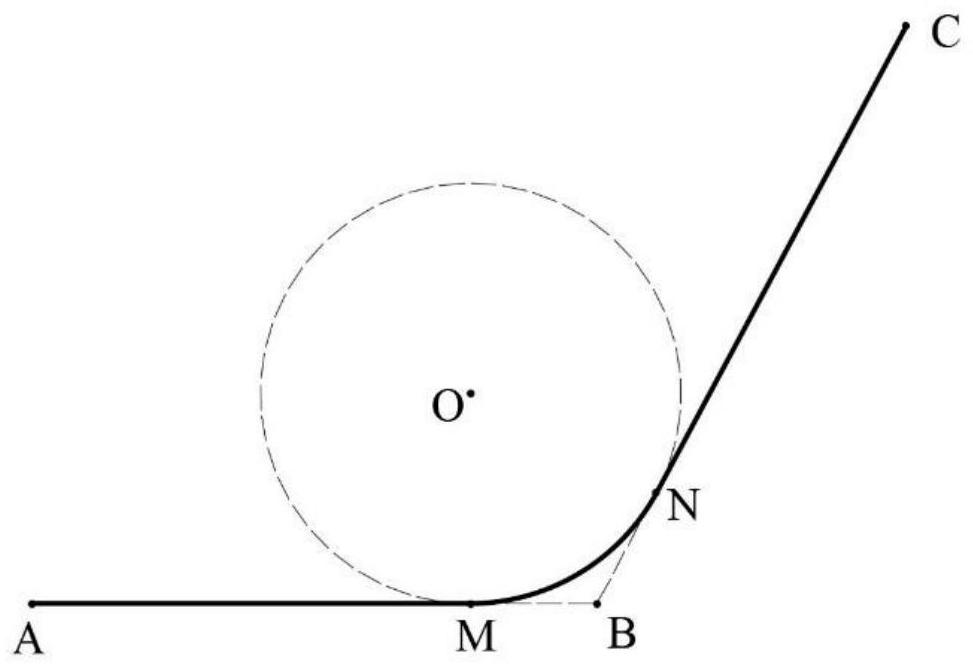
本发明提出一种用于船舶连续路径跟踪的圆弧路径生成方法,具体涉及一种用于动力定位船可以较完美地实现对直线加圆弧路径的生成,并对其模块化。由于在实际工程中,可以直接使用航点表中储存的航点信息,为直观地对比实际轨迹与预计轨迹的偏差,应根据预计的路径生成并显示出来。在本发明中,仅采用三个航点坐标和转弯半径作为算法的输入,三个点中间存在两段直线路径和一段半径为R
 更多
更多
成果亮点
本发明提供一种用于船舶连续路径跟踪的圆弧路径生成方法,用于在模块化的程序中输出过渡圆弧路径的三点坐标,以便利用画图命令在Qt程序中将规划出的直线加圆弧路径画出预计的路径轨迹,从而直观地对比实际轨迹与预计轨迹的偏差。本发明是通过以下技术方案实现的,本发明提出一种用于船舶连续路径跟踪的圆弧路径生成方法,所述方法包括以下步骤:第一步,将船舶航点A(N0,E0)点设定为第一段直线路径的起点,船舶航点B(N1,E1)点设定为第一、二段直线路径的拐点,船舶航点C(N2,E2)点设为第二段直径路线的终点;曲线路线的半径为Rturn;
团队介绍
哈尔滨工程大学源自1953年创办的中国人民解放军军事工程学院(哈军工),陈赓大将为首任院长,毛泽东主席为学院颁发《训词》,1959年被中共中央确定为全国重点大学。1966年退出军队序列更名为哈尔滨工程学院。1970年在哈军工原址以海军工程系为主体组建哈尔滨船舶工程学院(哈船院),1978年被国务院确定为全国重点大学。
成果资料

产业化落地方案
成果综合评价报告
评价单位:“科创中国”黑龙江科技服务团 (黑龙江省科学技术协会) 评价时间:2023-11-15



 下载app
下载app