


一种欠驱动水面无人船轨迹跟踪控制方法
发布时间: 2023-10-31
基本信息
合作方式:
技术转让
成果类型:
发明专利
行业领域:
电子信息技术
成果介绍
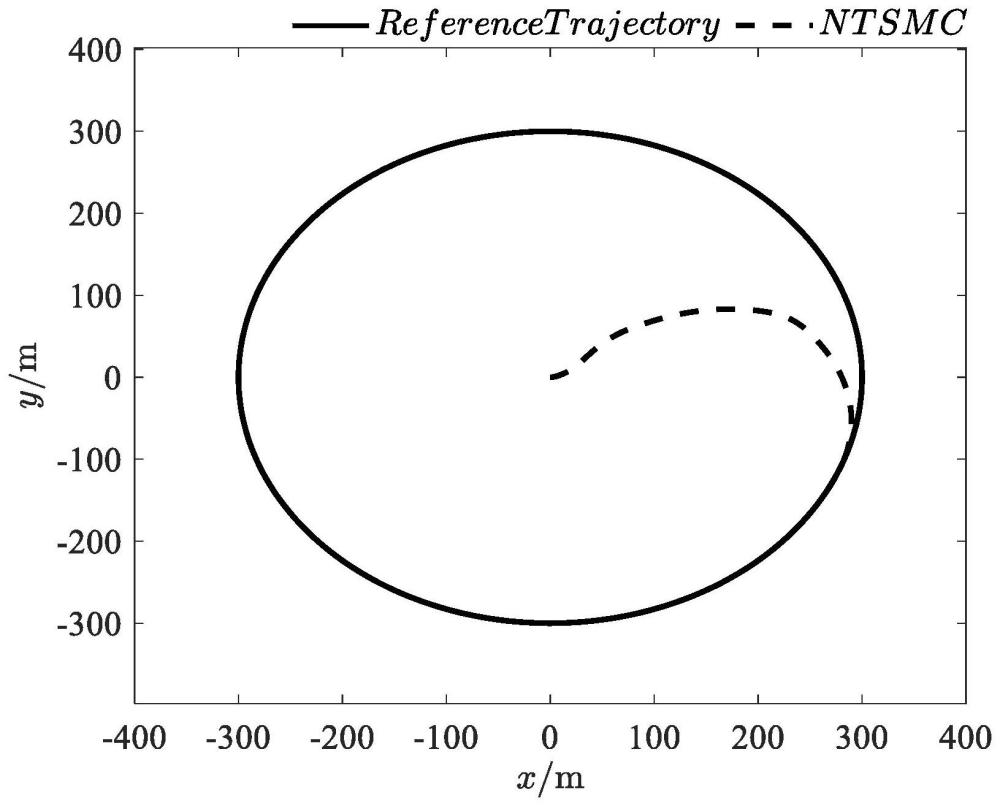
本发明涉及无人船技术领域,公开了一种欠驱动水面无人船轨迹跟踪控制方法,包括以下步骤:S1、建立无人船的三自由度数学模型:S2、给定无人船的期望位置,根据无人船的实际位置,定义位置误差,并采用反步递推法设计无人船纵向速度虚拟控制率α
成果亮点
近些年来,欠驱动水面无人船的轨迹跟踪控制问题是各国研究人员关注的重点,欠驱动水面无人船具有体型小、重量轻、隐蔽性好等特点被广泛应用于各种民用和军事领域当中,因此对其进行精准可靠的轨迹跟踪控制则是当下的研究热点。
在利用反步法设计无人船轨迹跟踪控制器的过程中,由于在递推设计过程中需要对虚拟控制律反复求导,随着系统阶数的不断增加,从而引发“微分爆炸”现象对控制器造成伤害;同时在设计控制器时,考虑到无人船的实际速度及位置信息与相应的期望值之间误差过大时,会使执行机构输入饱和,可能会产生对执行机构的不可逆性破坏;此外,在复杂的海洋环境下,容易受到风、浪、流等影响,出现偏离航线,航向不稳定等情况。本发明为了解决现有技术中存在的上述问题,提供了一种响应速度快、抗干扰性强、稳定性好的欠驱动水面无人船轨迹跟踪控制方法。发明针对存在输入饱和以及海洋环境中干扰未知的情况,利用生物启发模型很好的解决了控制器输入饱和问题,同时极大的简化了控制器的设计过程;利用非奇异终端滑模算法极大的提升了系统的响应速度,可以使控制器快速的跟踪上预设轨迹。
团队介绍
学校是由哈尔滨科学技术大学、哈尔滨电工学院和哈尔滨工业高等专科学校于1995年合并组建而成,三校均始建于20世纪50年代初期。学校于1998年划转黑龙江省,实行中央与地方共建、以地方为主的管理体制。
截至2023年3月,学校共有4个办学区,其中在哈尔滨市有西、南、东3个办学区,在山东省威海市荣成市设有哈尔滨理工大学威海校区,学校总占地面积***万平方米,教学基础设施面积***万平方米,图书馆藏书***万册,电子图书***万种;设有13个学院、1个教学部,开设65个本科专业;拥有博士后科研流动站7个,博士学位授权一级学科8个、硕士学位授权一级学科22个、专业硕士学位授权类别11个;有教职工2400余人,专任教师1600余人,全日制在校生32000余人
成果资料



 下载app
下载app