这种超强人工肌肉能在不同pH溶液中工作,最大伸展速度达每秒15毫米、最大应变达87%,且所需驱动电压极小。
相关成果日前发表于《先进材料》,有望为柔性驱动器在微机电系统、生物医学等领域的应用提供全新思路。
两种状态的切换漂泊信天翁可以连续飞行几十天不休息、猎豹最快速度能达每秒29米……
自然界中动物特异的运动能力,很大程度上得益于他们卓越的肌肉性能。
研制出性能出色的人工肌肉,一直是人类的梦想。
镓基液态金属兼具液体和固体的一些优良特性,且极易被氧化形成表面氧化膜。
未被氧化时,其具有目前已知液体中最大的表面张力;氧化后,表面张力可降至接近0。
中外联合研究组利用电化学方法快速、可逆地实现这两种状态的切换,同时通过构造液桥将液态金属液滴状态切换过程中的形态变化,转化为驱动行程及驱动力。
研究显示,这种超强液态金属人工肌肉,舒张时驱动电压仅需0.5伏,收缩时仅需4伏。
在0.25赫兹电压驱动下,能提供约20毫牛拉力、40毫牛推力,超过1毫米的驱动行程。
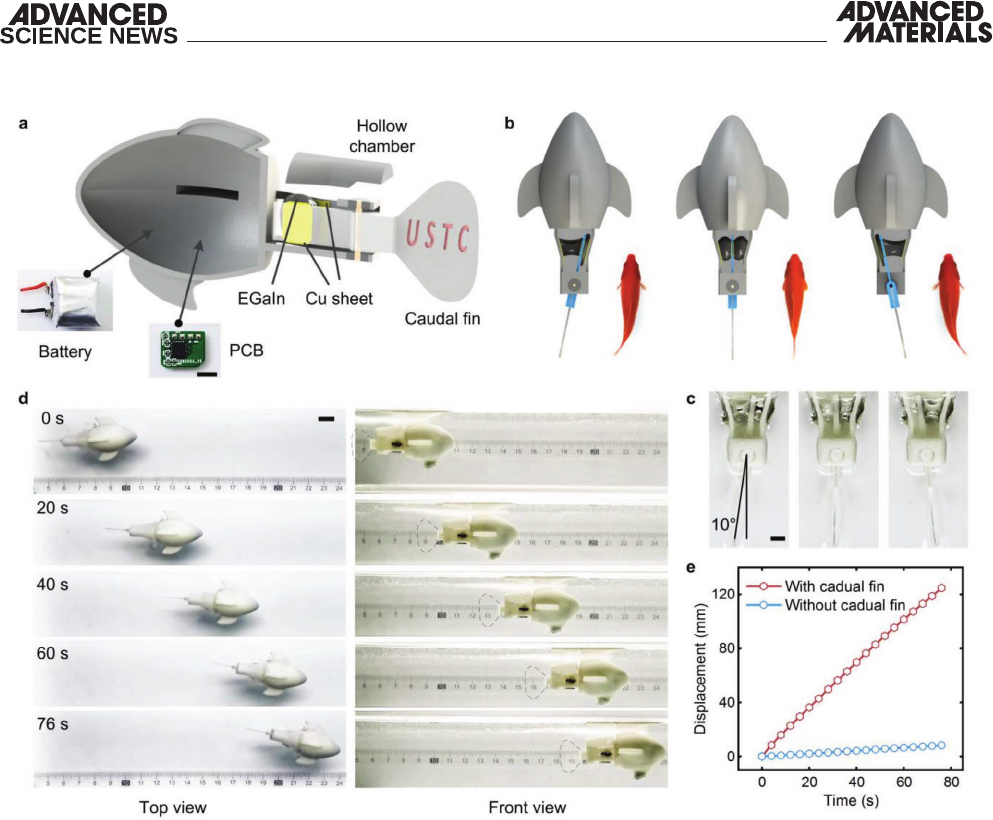
基于液态金属人工肌肉的仿生机器鱼(图片来自:《先进材料》)低功率驱动器为了验证驱动性能和应用潜力,该研究还展示了这种液态金属人工肌肉在编码显示、货物运载、可重构光学器件中的应用,并开发了一种自主游动的单尾鳍仿生机器鱼。
尾鳍一端的两侧对称布置两个驱动单元,两个单元的异步收缩-舒张驱动尾鳍连续摆动,从而驱动机器鱼向前游动。
机器鱼仅由一节3.7伏(80毫安时)锂电池供电,在2赫兹电压信号驱动下,机器鱼游动速度能达到每分钟10厘米,续航时间达40分钟。
该研究证实了基于液态金属液滴的柔性驱动器在低输入电压下具备卓越的驱动性能,为开发基于低功率驱动器机器人系统铺平了道路。
内容来自:中国科学报转载自:科普中国网

 微信公众号
微信公众号
 下载app
下载app
 京公网安备 11010202008974号
京公网安备 11010202008974号